Dairesel bir yörünge üzerinde sabit hızlı olarak gerçekleşen dönme hareketine Düzgün Dairesel Hareket denir.
Periyot (T):
Düzgün Dairesel Hareket yapan cismin bir tam tur atması
esnasında geçen süre.
Frekans (f):
Düzgün Dairesel Hareket yapan cismin bir saniyede attığı tur sayısı.
\({\rm{T}}{\rm{.f = 1}} \Rightarrow {\rm{T = }}\frac{{\rm{1}}}{{\rm{f}}} \Rightarrow {\rm{f = }}\frac{{\rm{1}}}{{\rm{T}}}\)
Çizgisel (Teğetsel) Hız (V):
Düzgün Dairesel Hareket yapan cismin birim zamanda dairesel yörünge üzerinde aldığı yol;
\(\begin{array}{*{20}{l}}{\vartheta = \frac{{\Delta x}}{{\Delta t}}}\\{\Delta x = 2\pi r}\\{\Delta t = T}\end{array}\)
\(\vartheta {\rm{ = }}\frac{{2\pi .r}}{T}\,\,{\rm{ = }}2\pi .r.f\)
Açısal Hız (w):
Düzgün Dairesel Hareket yapan cismin birim zamanda taradığı açıya denir.
\(\begin{array}{*{20}{l}}{w{\rm{ = }}\frac{\theta }{t}}\\{\theta {\rm{ = }}2\pi {\mkern 1mu} }\\{t{\rm{ = }}T}\end{array}\)
\(w{\rm{ = }}\frac{{2\pi }}{T}\,\,{\rm{ = }}2\pi .f\)
Çizgisel hız ile açısal hız arasında v=wr ilişkisi vardır.
Merkezcil İvme (a):
Düzgün Dairesel Hareket yapan cismin birim zamanda hızında görülen değişme miktarıdır. Bu değişim büyüklük olarak gözlenmez, fakat yön olarak hız sürekli değişir.
\(a{\rm{ = }}\frac{{2\pi \vartheta }}{T}{\rm{ = }}w\vartheta {\rm{ = }}{w^2}.r{\rm{ = }}\frac{{{\vartheta ^2}}}{r} \Rightarrow a{\rm{ = }}\frac{{2{\pi ^2}}}{{{T^2}}}.r\)
Merkezcil Kuvvet (Fm):
\(F{\rm{ = }}ma{\rm{ = }}m\frac{{{\vartheta ^2}}}{r}{\rm{ = }}m.{w^2}.r{\rm{ = }}m\frac{{4{\pi ^2}}}{{{T^2}}}r\)
Düzgün Dairesel Hareket Uygulamaları
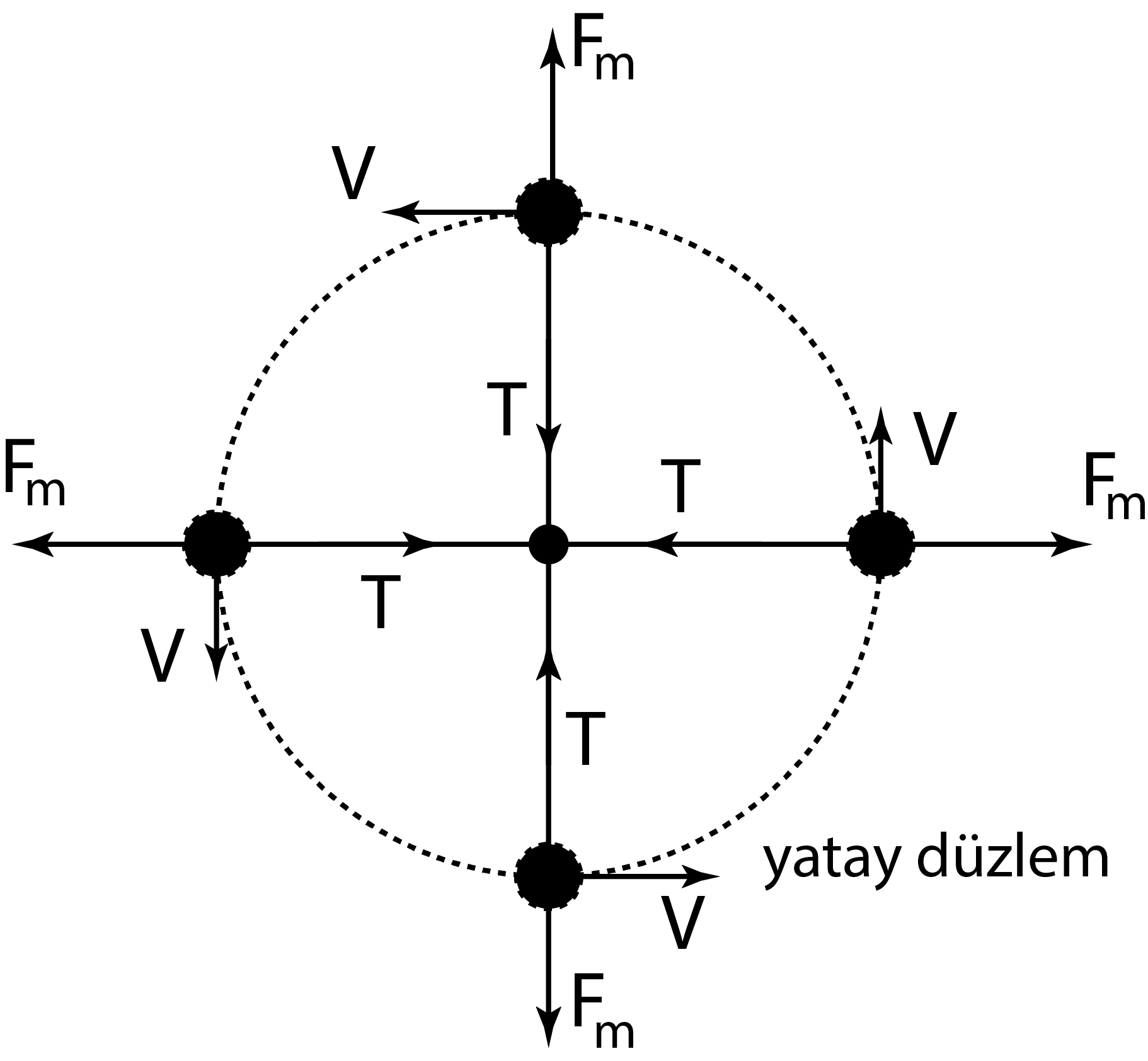
* Yatay Düzlemde Düzgün Dairesel Hareket
\(T{\rm{ = }}m.\frac{{{\vartheta ^2}}}{r}{\rm{ = }}m.\frac{{4{\pi ^2}}}{{{T^2}}}.r\)
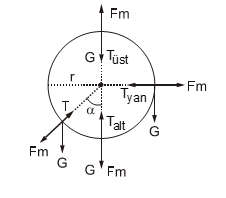
* Düşey Düzlemde Düzgün Dairesel Hareket
\(\begin{array}{*{20}{l}}{{T_{ust}} = {F_m} – G}\\{{T_{yan}} = {F_m}}\\{{T_{alt}} = {F_m} + G}\\{T = {F_m} + GCos\alpha }\end{array}\)
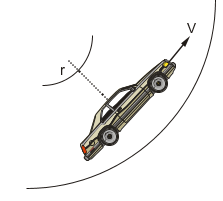
* Yatay Viraj
Viraja giren araba tekerlekleri ile yer arasındaki sürtünme sayesinde kaymadan virajı alabilir. Buna göre virajı kaymadan alabileceği en büyük hız;
\(\begin{array}{*{20}{l}}{{F_S} \ge {F_m}}\\{k.m.g \ge m.\frac{{{\vartheta ^2}}}{r}}\\{{\vartheta ^2} \le k.g.r}\\{\vartheta \le \sqrt {k.g.r} }\end{array}\)
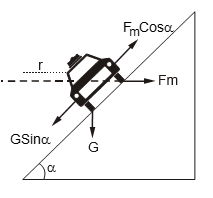
* Eğimli Viraj
Eğimli virajlarda cismin merkezkaç kuvvetini eğimden dolayı arabanın ağırlığı dengeler ve böylece sürtünmeye gerek duyulmaz. Bu durumda;
\(\begin{array}{*{20}{l}}{{F_m}Cos\alpha {\rm{ = }}GSin\alpha }\\{m.\frac{{{\vartheta ^2}}}{r}.Cos\alpha {\rm{ = }}m.g.Sin\alpha }\\{{\vartheta ^2}{\rm{ = }}r.g.\frac{{Sin\alpha }}{{Cos\alpha }}{\rm{ = }}r.g.\tan \alpha }\\{\vartheta {\rm{ = }}\sqrt {r.g.\tan \alpha } }\end{array}\)
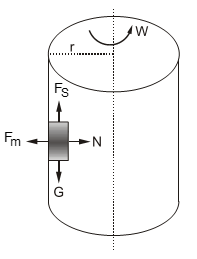
* Rotor
Cismin düşmeden dönebilmesi için;
\(\begin{array}{*{20}{l}}{{F_S} \ge G}\\{{F_S}{\rm{ = }}k.N{\mkern 1mu} {\mkern 1mu} ;{\mkern 1mu} {\mkern 1mu} N{\rm{ = }}{F_m} \Rightarrow {F_S}{\rm{ = }}k.{F_m}}\\{k.m.\frac{{{\vartheta ^2}}}{r} \ge m.g}\\{\vartheta {\rm{ = }}\sqrt {\frac{{r.g}}{k}} }\end{array}\)
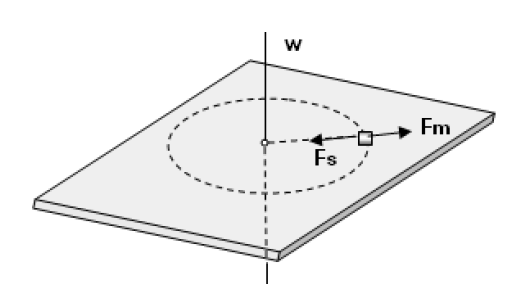
* Yatay Düzlemde Dönen Tabla:
Cismin kaymadan durabilmesi için;
\(\begin{array}{*{20}{l}}{{F_S} \ge {F_m}}\\{k.m.g \ge m.\frac{{{\vartheta ^2}}}{r}}\\{{\vartheta ^2} \le k.g.r}\\{\vartheta {\rm{ = }}\sqrt {k.g.r} }\end{array}\)
Sürtünme kuvveti cismin alt yüzeyi ile hareket ettiği ortamın yüzeyi arasında oluşan ve daima cismin…
-Şekildeki cisim F kuvveti yönünde hareket ediyorsa ivme ifadesi nedir? N=G olduğundan Fs = k…
Hareketi ve harekete sebep olan kuvveti birlikte inceleyen mekanik bölüme Dinamik denir. Dinamiğin üç kanunu…
Hareket Seçilen durgun bir referans noktasına göre cismin zaman içerisinde yer değiştirmesine hareket denir. Yörünge…
DOĞRU BOYUNCA HAREKET (DOĞRUSAL HAREKET) Hareket Seçilen durgun bir referans noktasına göre cismin zaman içerisinde…
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}